背景
话说我们的国产之光 大疆创新(DJI) 公司不仅很会造无人机,而且还很注重人才的培养。于是,他们就弄出了 RoboMaster 机甲大师 系列活动。最开始,它是面向各大高校的机器人比赛。在大疆进军教育市场后,他们的团队又造出了 RoboMaster S1/EP 系列的教育机器人。由于大疆在内部已经做了图形化编程的适配,这类机器人就相对更适合青少年 反正我是玩不惯图形化编程,也许 有利于扩大市场。
在这样的背景下,大疆联合几所高校(今年为 西安交通大学、电子科技大学、华中科技大学),与其共同开展“疆来计划”,旨在提升青少年,尤其是高中生的科学素养和编程技能。因此我 抱着试试看的态度 本着“能学到东西就是好地方”的宗旨报名参加了今年电子科技大学的“疆来计划”。
当然,要参加是有门槛的,得先做题,还要通过视频面试这样的选拔,才能进入到最终的线上和线下夏令营活动。既然要做题,就肯定少不了一些奇奇怪怪的、平常根本不会想到的思路清奇的题。于是就有了我们这一篇博客。
题目
在“大疆教育平台”下载模拟器,通过“大师之路”的学习,控制EP机器人,在模拟器中完成椭圆形图案的绘制,尽可能用更多的方案绘制出椭圆形轨迹(包括但不限于车头方向不变,车头方向时时改变、车头始终指向焦点等)(提交轨迹绘制截图及程序截图)
那他既然要求用多种方法画椭圆,我就用勉为其难地用给出的三种都做一遍吧。
解法
初始化

车头方向不变
这种解法参考了 Scratch 画椭圆的方法(百度贴吧) 的 9 楼。
效果图示

数学原理
椭圆的参数方程:
程序实现
代码展示

代码解释 (C++)
void ellipse1(){
calc1();
move1();
velocity = 0.1;
setVelocity(velocity);
for(int i=0;i<240;i++){
theta += 1.5;
calc1();
move1();
}
}
// 用椭圆的参数方程计算导航点坐标
void calc1(){
tgtX = a * cos(theta);
tgtY = b * sin(theta);
pathX = tgtX - getX();
pathY = tgtY - getY();
}
// 移动到导航点
void move1(){
if(pathX > 0)
move(90, pathX);
else
move(-90, abs(pathX));
if(pathY > 0)
move(0, pathY);
else
move(180, abs(pathY));
}车头沿切线
数学原理
椭圆上任意一点 $A$ 到两个焦点 $F_{1}, F_{2}$ 的距离之和 $d$ 始终为一个定值,也就是长轴 $2a$。
那么我们就根据巡线的思路,如果 $d>2a$ 就往里拐,反之就往外拐。
但是,这样会造成小车的路径在椭圆的基准线两侧波动,最后会偏到完全修不回来。
因此,我们引入误差控制,如果 $d>2a$ 那么就往里拐并向里移动 $d-2a$ 米以修正掉由于转向引起的误差。反之,就向外拐并向外移动 $2a-d$ 米。
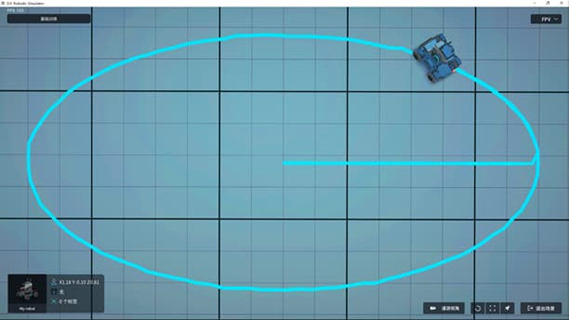
效果图示

程序实现
代码展示
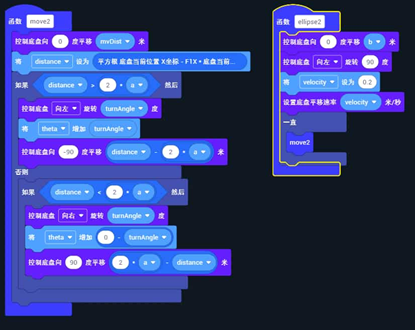
被折叠的代码块是:
将 distance 设置为 $\sqrt{\left( posX - F_{1}X \right)^2 + posY^2} + \sqrt{\left( posX - F_{2}X \right)^2 + posY^2}$。
代码解释 (C++)
void move2(){
move(0, mvDist);
distance = sqrt(pow((getX()-F1X), 2) + pow(posY, 2)) + sqrt(pow((getX()-F2X), 2) + pow(posY, 2));
if(distance > 2*a){
turn(-1, turnAngle);
theta += turnAngle;
move(-90, (distance - 2*a));
}
else{
if(distance < 2*a){
turn(1, turnAngle);
theta += turnAngle;
move(90, (2*a - distance));
}
}
}
void ellipse2(){
move(0, b);
turn(-1, 90)
velocity = 0.2;
setVelocity(velocity);
while(1)
move2();
}车头朝向焦点
数学原理
同上。
但是这里会涉及到车头方向和移动方向的转换。
效果图示
程序实现
代码展示
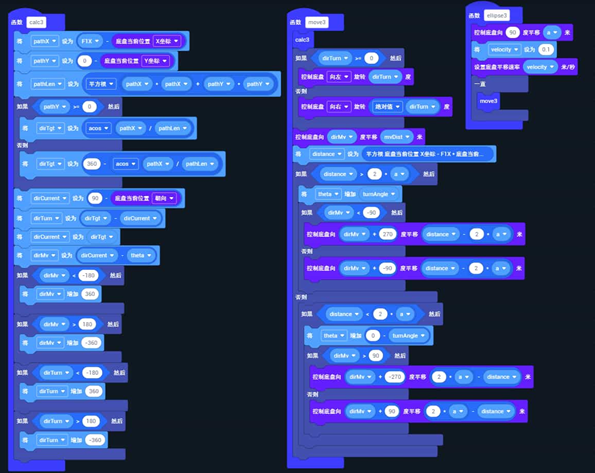
代码解释
void calc3(){
float pathX = F1X - getX();
float pathY = 0 - getY();
float pathLen = sqrt(pow(pathX, 2) + pow(pathY, 2));
if(pathY >= 0)
dirTgt = acos(pathX / pathLen);
else
dirTgt = 360 - acos(pathX / pathLen);
dirCurrent = 90 - getDirection();
dirTurn = dirTgt - dirCurrent;
dirCurrent = dirTgt;
dirMv = dirCurrent - theta;
if(dirMv < -180) dirMv += 360;
if(dirMv > 180) dirMv -= 360;
if(dirTurn < -180) dirTurn += 360;
if(dirTurn > 180) dirTurn -= 360;
}
void move3(){
calc3();
if(dirTurn >= 0)
turn(-1, dirTurn);
else
turn(1, abs(dirTurn));
move(dirMv, mvDist);
distance = sqrt(pow((getX()-F1X), 2) + pow(posY, 2)) + sqrt(pow((getX()-F2X), 2) + pow(posY, 2));
if(distance > 2*a){
theta += turnAngle;
if(dirMv < -90)
move((dirMv + 270), (distance - 2*a));
else
move((dirMv - 90), (distance - 2*a));
}
else{
theta -= turnAngle;
if(dirMv > 90)
move((dirMv - 270), (2*a - distance));
else
move((dirMv + 90), (2*a - distance));
}
}
void ellipse3(){
move(90, a);
velocity = 0.1;
setVelocity(velocity);
while(1)
move3();
}
